- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ບ້ານ
>
ຜະລິດຕະພັນ > ຫນ່ວຍງານຕິດຕາມກວດກາໃນປະຈຸບັນ > ເຊັນເຊີຕິດຕາມກວດກາໃນປະຈຸບັນທີ່ຍັງຄ້າງຄາ > ຫນ່ວຍງານຕິດຕາມກວດກາປະເທດ EV DAXER EV







ຫນ່ວຍງານຕິດຕາມກວດກາປະເທດ EV DAXER EV
Xinkong ແມ່ນປະເທດຜູ້ຜະລິດແລະຜູ້ສະຫນອງເຄື່ອງຕິດຕາມປະສົບການຂອງຜູ້ປະສານງານ EV ທີ່ມີຄວາມຊໍານານໃນປະຈຸບັນໂດຍມີປະສົບການຫຼາຍປີ. ຫນ່ວຍບໍລິການດ້ານຄວາມປອດໄພຂອງພວກເຮົາທີ່ມີຄຸນນະພາບໃນປະຈຸບັນ, ແລະພວກເຮົາຈະໄດ້ຮັບການປຶກສາກັບພວກເຮົາ, ລະບົບທີ່ມີຂໍ້ບົກພ່ອງສາມາດກາຍເປັນອັນຕະລາຍສໍາລັບຄົນຫຼືເຮັດໃຫ້ເກີດໄຟໄຫມ້. ກ່ອນທີ່ມັນຈະມາເຖິງຕອນນັ້ນ, ໂມດູນພະລັງງານຕ້ອງໄດ້ຮັບການຕັດຂາດຈາກຕາຂ່າຍໄຟຟ້າ. ກະແສການຮົ່ວໄຫຼມີ DC ແລະສ່ວນປະກອບ AC. ສະນັ້ນຫນ່ວຍງານຕິດຕາມກວດກາ AC / DC-DC ແມ່ນມີຄວາມຈໍາເປັນ.
ຕົວແບບ:XKCA-01-MD
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
Xinkong ແມ່ນເຄື່ອງຈັກຜະລິດເຄື່ອງຈັກແລະຜູ້ສະຫນອງຫນ່ວຍງານທີ່ມີຄຸນນະພາບດີ. Wenzhou Xinkong ນໍາເຂົ້າແລະສົ່ງອອກ. ເຄືອຂ່າຍການຂາຍຂອງບໍລິສັດກວມເອົາຫລາຍປະເທດແລະເຂດແຄວ້ນເອີຣົບແລະອາຊີຕາເວັນອອກສ່ຽງໃຕ້ແລະບໍລິການແມ່ນໄດ້ຮັບຜົນດີຈາກລູກຄ້າດີ. ທ່ານສາມາດພັກຜ່ອນທີ່ຫມັ້ນໃຈເພື່ອຊື້ຫນ່ວຍງານຕິດຕາມກວດກາ EV Charger ທີ່ຍັງເຫຼືອຈາກພວກເຮົາ.
XKKA Seridual Module ທີ່ມີການຊອກຄົ້ນຫາແບບ XKCA ແມ່ນສາມາດນໍາໃຊ້ໄດ້ຢ່າງກວ້າງຂວາງ, ໂດຍສະເພາະໃນສະຖານີໄຟຟ້າ, ລົດຈັກໄຟຟ້າ, ຄ່າໄຟຟ້າ, ແລະການຄຸ້ມຄອງຄວາມປອດໄພຂອງພະລັງງານ. ມັນສະຫນອງການນໍາໃຊ້ແບບງ່າຍດາຍແລະງ່າຍດາຍ.
ຄຸນນະສົມບັດ
■ການສະຫນອງດຽວ +5 v
ass ຜົນຜະລິດທີ່ເປີດ Digital Digital Dial-digital, ການສະແດງການເດີນທາງ 20mac / 6madc
■ເຄື່ອງໃຊ້ສໍາລັບປະຖົມ 3 ຟະປະຖົມໃນໂມດູນ (ປະເພດ. 32a, ສູງສຸດທີ່ເຄຍ. 40a)
■ຜົນໄດ້ຮັບ PWM ສໍາລັບການຊີ້ບອກມູນຄ່າໃນປະຈຸບັນ DC ທີ່ຍັງເຫຼືອ (0 ~ 30ma)
■ຜົນຜະລິດຂໍ້ມູນສໍາລັບການຊີ້ບອກຄວາມຜິດຂອງລະບົບ
■ຕິດຢູ່ໃນກະດານ PCB
■ການທົດສອບຕົວເອງ
ຄໍາຮ້ອງສະຫມັກ
desciction ການຊອກຄົ້ນຫາຂໍ້ຜິດພາດຂອງພື້ນ
station ສະຖານີຮັບຜິດຊອບດ້ານຍານພາຫະນະໄຟຟ້າໄຟຟ້າ
■ການກວດສອບການຮົ່ວໄຫລໃນການກວດສອບໃນປະຈຸບັນ
ມາດຕະຖານ
■ສາມາດໃຊ້ໄດ້ກັບຄວາມຕ້ອງການໃນປະຈຸບັນຂອງ IEC 62752
■ສາມາດໃຊ້ໄດ້ກັບຄວາມຕ້ອງການໃນປະຈຸບັນຂອງ IEC 62955 ສໍາລັບ RDC-PD
■ໃຊ້ໄດ້ສໍາລັບຄວາມຕ້ອງການໃນປະຈຸບັນ UL2231
■ສ່ວນປະກອບທີ່ຖືກອອກແບບເຕັມຮູບແບບ ROHS / ເຂົ້າເຖິງ

Asserance ຜະລິດຕະພັນ
ສະຫມັກແບບປົກກະຕິ:
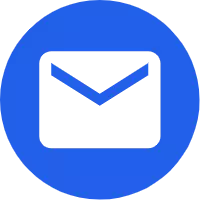
ຄໍານິຍາມ PIN:
| PIN-NO | ຊື່ PIN | ຫນ້າທີ່ |
| 1 | ຜິດ | ■ເຂັມປະກອບທີ່ເປີດກວ້າງສໍາລັບສະແດງສະພາບຄວາມຜິດຂອງລະບົບ ■ໃນເວລາທີ່ບໍ່ມີຄວາມຜິດຂອງລະບົບ, PIN ນີ້ຈະຖືກດໍາເນີນການກັບ gnd ■ເວລາທີ່ມີຄວາມຜິດຂອງລະບົບເກີດຂື້ນ, ລະຫັດ PIN ນີ້ຈະມີຄວາມຂັດແຍ້ງສູງ |
| 2 | ທົດສອບ | ■ເມື່ອ PIN ນີ້ຖືກດໍາເນີນໄປເປັນ 0VDC, ໂມດູນນີ້ຈະຄິດໄລ່ການລອຍລົມແລະເກັບຮັກສາໃຫ້ລົງທະບຽນໃນ MCU ເພື່ອໃຫ້ສໍາເລັດໃນການກວດສອບ. ■ຫຼັງຈາກທີ່ການສອບທຽບສໍາເລັດຮູບ, ລະບົບຈະສ້າງກະແສປະຈຸບັນທີ່ຍັງເຫຼືອພາຍໃນ, ເພື່ອກວດສອບວ່າໂມດູນໃດສາມາດເຮັດໄດ້ໃນການຕອບຮັບທີ່ຖືກຕ້ອງ. ໃນລະຫວ່າງຂັ້ນຕອນນີ້, X20-Out & X6-Out ຈະຫັນໄປສູ່ຄວາມຂັດແຍ້ງສູງຖ້າໂມດູນເຮັດວຽກທີ່ຖືກຕ້ອງ. ເອົາໃຈໃສ່: ■ເມື່ອໃຊ້ຟັງຊັນການທົດສອບ, ວົງຈອນຕົ້ນຕໍຕ້ອງຖືກຕັດເພື່ອຮັບປະກັນກະແສປະຈຸບັນທີ່ຍັງເຫຼືອ ■ເວລາໃຊ້ຫນ້າທີ່ PIN ນີ້, ກະລຸນາປະຕິບັດຕາມຕົວເລກແຜນວາດເວລາ |
| 3 | x6-out | ຖ້າຫາກວ່າໃນປະຈຸບັນທີ່ຍັງຄ້າງຄາເກີນມູນຄ່າ Trip Trip (ສໍາລັບໂມດູນນີ້ໂດຍປົກກະຕິ 4.5 madc), ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນສະພາບທີ່ສູງ ■ໃນເວລາທີ່ R.ms ທີ່ເຫລືອຢູ່ໃນປະຈຸບັນທັງຫມົດໃນປະຈຸບັນ. ■ເວລາທີ່ລະບົບ - ຄວາມຜິດແມ່ນເກີດຂື້ນ, ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນສະພາບທີ່ບໍ່ມີຕົວຕົນ ■ສໍາລັບສະພາບປົກກະຕິອື່ນໆ, ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນລະດັບຕໍ່າ (GND) |
| 4 | X20-out | ຖ້າຫາກວ່າໃນປະຈຸບັນທີ່ຍັງຄ້າງຄາເກີນມູນຄ່າການຫົດຕົວໃນປະຈຸບັນທັງຫມົດ (ສໍາລັບບໍລິສັດບໍລິສຸດ 17,8 ໂຕ), ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນສະພາບທີ່ສູງ ■ເວລາທີ່ລະບົບ - ຄວາມຜິດແມ່ນເກີດຂື້ນ, ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນສະພາບທີ່ບໍ່ມີຕົວຕົນ ■ສໍາລັບສະພາບປົກກະຕິອື່ນໆ, ຜົນຜະລິດນີ້ແມ່ນຢູ່ໃນລະດັບຕໍ່າ (GND) |
| 5 | ເກ | ■ດິນ |
| 6 | VDD | ■ການສະຫນອງພະລັງງານແບບໂມດູນ, ມາດຕະຖານແຮງດັນມາດຕະຖານ 5VDC ■ການປ້ອນຂໍ້ມູນແຮງດັນທີ່ຈໍາເປັນຢູ່ພາຍໃນ 4.85 ~ 5.15vdC, ຄວາມສາມາດຂອງຜົນຜະລິດ> ລະມັດລະວັງ> 100MA ■ການສະຫນອງພະລັງງານ ipple ≤ 150mv (ມັນໄດ້ຖືກແນະນໍາໃຫ້ໃຊ້ວົງຈອນ ldo, ສໍາລັບການອ້າງອີງ IC LP2985A-50db) |
| 7 | pwm | ■ສະແດງສ່ວນປະກອບຂອງ DC ທີ່ຍັງເຫຼືອກັບວົງຈອນ - ວົງຈອນທີ່ມີ 8khz pwm ■ຄວາມລະອຽດຜົນຜະລິດ = 3.33% / madc ຈາກ 0 ~ 30madc ■ຄວາມຖືກຕ້ອງປະມານ± 0.5MA |
| 8 | N.C. | ■ບໍ່ໄດ້ໃຊ້ |
ລັກສະນະໄຟຟ້າ / ຄວາມຫນ້າເຊື່ອຖື:
| ທາດ | ນາວາ | ເພີ້ມນາ | ສູງສຸດທີ່ເຄຍ | ຫນ່ວຍງານ | |
| 1 | ປະຈຸບັນ A RMS RMS ປະຈຸບັນ (1phase / 3phae) | 32 | 40 | A | |
| 2 | ແຮງດັນ | 4.85 | 5 | 5.15 | V |
| 3 | ອຸນຫະພູມການປະຕິບັດງານອາກາດລ້ອມຮອບ | -40 | +105 | ℃ | |
| 4 | ອຸນຫະພູມການເກັບຮັກສາອາກາດລ້ອມຮອບ | ປະເທດ | +65 | ℃ | |
| 5 | ການບໍລິໂພກພະລັງງານສະຖິດ | 110 | mw | ||
| 6 | ການເກັບກູ້ໄຟຟ້າ; ປະຖົມ | 6.5 | mm | ||
| 7 | ການເກັບກູ້ໄຟຟ້າ; ມັດທະຍົມຕອນປາຍ | 10 | mm | ||
| 8 | ໄລຍະຫ່າງໄກ້ຄຽງ; ປະຖົມ | 8 | mm | ||
| 9 | ໄລຍະຫ່າງໄກ້ຄຽງ; ຂັ້ນຕົ້ນປະຖົມ | 10 | mm | ||
| 10 | ແຮງດັນໄຟຟ້າ, ລະດັບຕໍ່າ | 0 | 0.6 | V | |
| 11 | ແຮງດັນໄຟຟ້າ, ລະດັບສູງ | 4.2 | 5 | V | |
| 12 | ຊີວິດການອອກແບບທິດສະດີ | 20 | ປີ | ||
| 13 | ລະດັບປະຕິບັດງານ | 4000 | m |
ການເດີນທາງ - ປັດຈຸບັນ (ຄຸນລັກສະນະທີ່ກ່ຽວຂ້ອງກັບປະຈຸບັນທີ່ຍັງເຫຼືອ):
| ນ້ໍາຫນັກ WAV | Freq | ນາວາ | ເພີ້ມນາ | ສູງສຸດທີ່ເຄຍ | ຫນ່ວຍງານ | |
| 1 | ac | 50hz | 15 | 17.8 | 20 | ຂອງ |
| 2 | A0 | 50hz | 11 | 17 | 26 | ຂອງ |
| 3 | A90 | 50hz | 10 | 18.5 | 27 | ຂອງ |
| 4 | A135 | 50hz | 10 | 22.9 | 28 | ຂອງ |
| 5 | 2PDC | - | 3.5 | 5.0 | 7 | ຂອງ |
| 6 | 3pdc | - | 3.1 | 4.5 | 6.2 | ຂອງ |
| 7 | S-DC | - | 3.0 | 4.5 | 6.0 | ຂອງ |
ເວລາທີ່ໃຊ້ເວລາ (ທີ່ກ່ຽວຂ້ອງກັບປະຈຸບັນທີ່ຍັງເຫຼືອ):
| ນ້ໍາຫນັກ WAV | Freq | ປະຈຸບັນ | ເພີ້ມນາ | ສູງສຸດທີ່ເຄຍ | ຫນ່ວຍງານ | |
| 1 | ac | 50hz | 30ma | 50 | 1000 | ທ້າວ MS |
| 2 | ac | 50hz | ຄວາມຫມາຍ 60MA | 16 | 100 | ທ້າວ MS |
| 3 | ac | 50hz | 150MA | 15 | 60 | ທ້າວ MS |
| 4 | ac | 50hz | 5A ~ 100A | 8.5 | 60 | ທ້າວ MS |
| 5 | A0 | - | 42MA | 25 | 100 | ທ້າວ MS |
| 6 | A0 | - | 84MA | 18 | 60 | ທ້າວ MS |
| 7 | A0 | - | ວັນນະຄະນົມ | 10 | 60 | ທ້າວ MS |
| 8 | A0 + DC | - | 42MA + 6MADC | 18 | 60 | ທ້າວ MS |
| 9 | A0 + DC | - | 84MA + 6MADC | 15 | 60 | ທ້າວ MS |
| 10 | A0 + DC | - | 210MA + 6MADC | 15 | 60 | ທ້າວ MS |
| 11 | S-DC | - | 6ma | 48 | 1000 | ທ້າວ MS |
| 12 | S-DC | - | ຄວາມຫມາຍ 60MA | 16 | 100 | ທ້າວ MS |
| 13 | S-DC | - | 300MA | 8.5 | 60 | ທ້າວ MS |
| 14 | 2PDC / 3PDC | - | ຄວາມຫມາຍ 60MA | 20 | 100 | ທ້າວ MS |
| 15 | 2PDC / 3PDC | - | 120MA | 15 | 60 | ທ້າວ MS |
| 16 | 2PDC / 3PDC | - | 300MA | 12 | 60 | ທ້າວ MS |
| 17 | 2PDC / 3PDC | - | 5A ~ 100A | 12 | 60 | ທ້າວ MS |
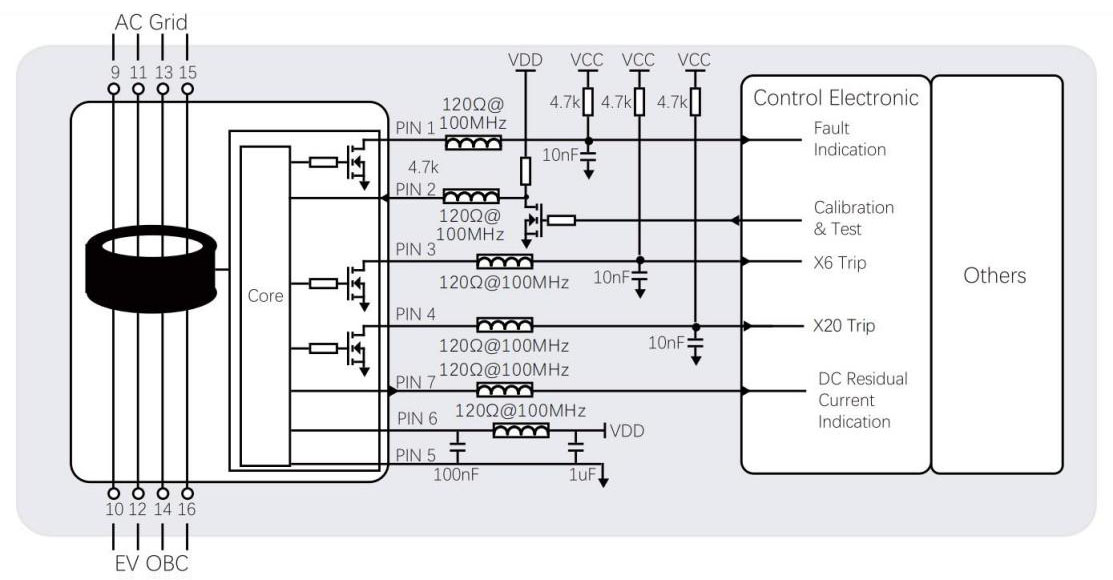
ຂະຫນາດຂອງຜະລິດຕະພັນ (ມມ):
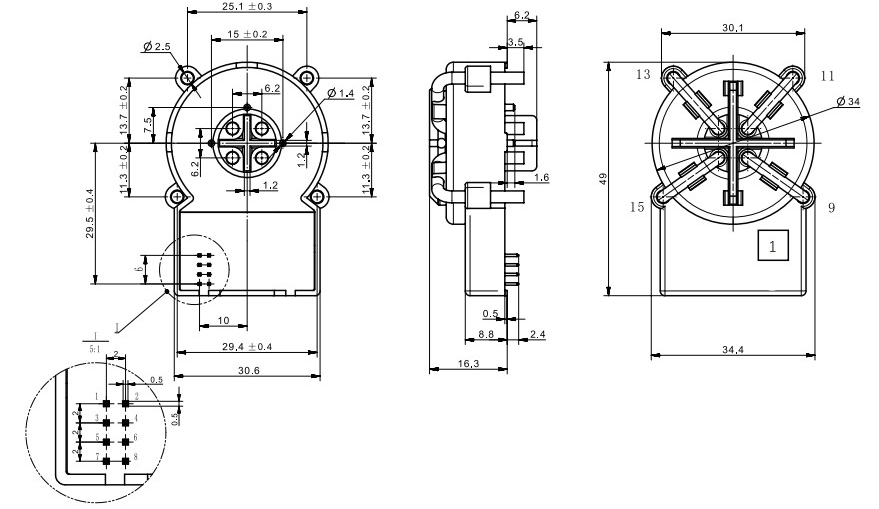
ແຜນທີ່ການກໍານົດເວລາ:
■ t0 ເປັນເວລາລໍຖ້າສໍາລັບການ stablization ລະບົບ, t0≈ 270ms
■ t1 ເປັນເວລາລໍຖ້າ, ມັນໄດ້ຖືກແນະນໍາໃຫ້ T1 ≥ 100ms
■ T2 ເປັນເວລາການສອບທຽບແລະການທົດສອບຕົນເອງ, ມັນໄດ້ຖືກແນະນໍາໃຫ້ມີ 50ms ≤ T2 ≤ 100ms
■ t3 ເປັນເວລາລໍຖ້າສໍາລັບການທົດສອບຕົວເອງ DC, T3≈ 200ms, ມັນໄດ້ຖືກແນະນໍາໃຫ້ອ່ານ x6m ຫຼັງຈາກ 300ms
■ T4 ເປັນເວລາລໍຖ້າສໍາລັບການທົດສອບຕົນເອງ AC, T4≈ 690ms, ມັນໄດ້ຖືກແນະນໍາໃຫ້ອ່ານ x30-out ຫຼັງຈາກ 300ms
■ T5 ເປັນການທົດສອບຕົວຊີ້ວັດການທົດສອບຕົວເອງ, T5 ≈ 1580ms
■ T6 ເປັນ DC-Indication Indication Dural Duration ເວລາ, T6 ≈ 1090ms
ວົງຈອນທົດສອບດ້ວຍຕົນເອງ:
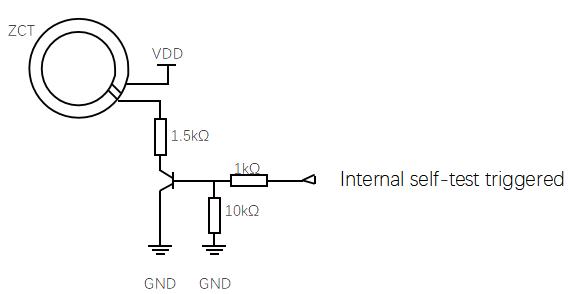
■ 2 WINTS WINTS ໃນ ZCT ເພື່ອສ້າງປະຈຸບັນ DC ທີ່ຍັງຄ້າງຄາໃຫມ່
■ໂດຍການໃຊ້ VDD ເພື່ອສ້າງມູນຄ່າປົກກະຕິ = 6.53 madc madcated ໃນປະຈຸບັນ
ປະຈຸບັນນີ້ແມ່ນສະພາບການທີ່ມີການຈໍາກັດທີ່ສຸດໃນການທົດສອບວ່າລະບົບກໍາລັງເຮັດວຽກຖືກຕ້ອງ
ຂອບເຂດດິຈິຕອລ
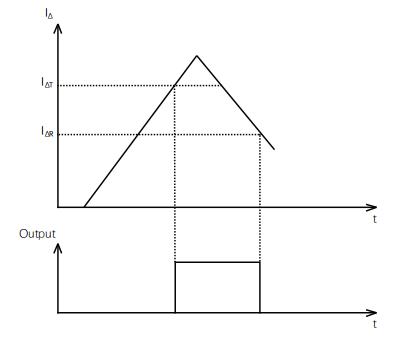
■ເພື່ອຫລີກລ້ຽງສັນຍານ accillation ສັນຍານ, ການຫັນປ່ຽນຜົນຜະລິດໄດ້ຖືກກໍານົດໄວ້ດ້ວຍຄວາມກ້າວຫນ້າໃນລະດັບແລະລະດັບການຟື້ນຟູ
■ໃນເວລາທີ່ triping ໃກ້ຈະເຂົ້າສູ່  ບັນລຸໄດ້, flip x-out ທີ່ກ່ຽວຂ້ອງ, ແລະໃນເວລາທີ່ປະຈຸບັນຫຼຸດລົງສູ່ລະດັບການຟື້ນຕົວຂອງ
ບັນລຸໄດ້, flip x-out ທີ່ກ່ຽວຂ້ອງ, ແລະໃນເວລາທີ່ປະຈຸບັນຫຼຸດລົງສູ່ລະດັບການຟື້ນຕົວຂອງ  , ສິ່ງທີ່ກ່ຽວຂ້ອງທີ່ກ່ຽວຂ້ອງທີ່ກ່ຽວຂ້ອງອີກເທື່ອຫນຶ່ງ, ກັບໄປທີ່ລັດລະດັບຕໍ່າ
, ສິ່ງທີ່ກ່ຽວຂ້ອງທີ່ກ່ຽວຂ້ອງທີ່ກ່ຽວຂ້ອງອີກເທື່ອຫນຶ່ງ, ກັບໄປທີ່ລັດລະດັບຕໍ່າ
■  ຖືກກໍານົດເປັນມູນຄ່າການຖີ້ມປົກກະຕິ 100%, ແລະ
ຖືກກໍານົດເປັນມູນຄ່າການຖີ້ມປົກກະຕິ 100%, ແລະ  ຖືກກໍານົດເປັນມູນຄ່າການເທັກເກັດປົກກະຕິ 55%
ຖືກກໍານົດເປັນມູນຄ່າການເທັກເກັດປົກກະຕິ 55%
Hot Tags: ຫນ່ວຍງານຕິດຕາມກວດກາປະເທດ EV DAXER EV, ຈີນ, ຜູ້ຜະລິດ, ຜູ້ສະຫນອງ, ໂຮງງານ, ທີ່ຜະລິດຢູ່ຈີນ, ມີຄຸນນະພາບ, ກ້າວຫນ້າ
ປະເພດທີ່ກ່ຽວຂ້ອງ
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.